Winner, 1st Place in ROS (Robotic Online Shorts) International Film Festival, 2017
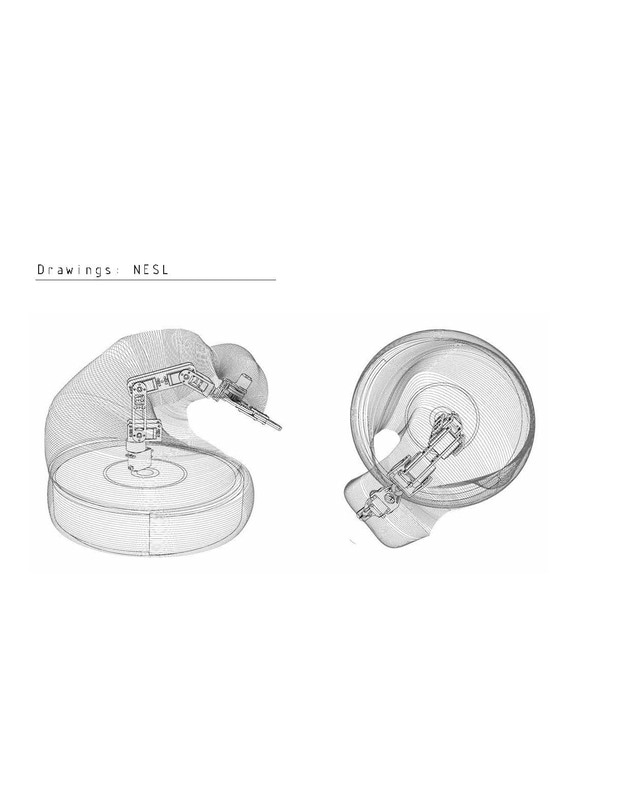
NESL is a short film arising out of a multi-year speculative design research project on Phenomenal Machines. In this project there are several distinct non-human agents (robotic and mineral) with differing methods of affecting and sensing which comprise imprecisely located cognitive machines. The locus and outcome of this cognition produce diverse effects which are made visual in this project. The robots utilize basic vision and behavioral algorithms which enable them to interact within their landscape to influence crystal formation and growth in both form and color. The robotic landscape represents a highly imprecise agency with sensing abilities obscured and behavior seemingly randomized in response to crystal proximity and robot behavior. The crystals are “sensed” by robots and the landscape and are subject to perturbations both beneficial and negligible by the external agents. Their growth can be facilitated, amplified or disturbed by both the actions of the dynamic terrain (through secretion of salt solution or expansion and contraction of the dynamic surface) or the interventions of the robots operating within the terrain (through placement, movement and disruption). Of primary interest are the interactions occurring between systems and the emergent effects produced suggesting causality and aesthetic implications within a set of highly synthetic relations comprising machine, materials and narrative.
NESL is a short film arising out of a multi-year speculative design research project on Phenomenal Machines. In this project there are several distinct non-human agents (robotic and mineral) with differing methods of affecting and sensing which comprise imprecisely located cognitive machines. The locus and outcome of this cognition produce diverse effects which are made visual in this project. The robots utilize basic vision and behavioral algorithms which enable them to interact within their landscape to influence crystal formation and growth in both form and color. The robotic landscape represents a highly imprecise agency with sensing abilities obscured and behavior seemingly randomized in response to crystal proximity and robot behavior. The crystals are “sensed” by robots and the landscape and are subject to perturbations both beneficial and negligible by the external agents. Their growth can be facilitated, amplified or disturbed by both the actions of the dynamic terrain (through secretion of salt solution or expansion and contraction of the dynamic surface) or the interventions of the robots operating within the terrain (through placement, movement and disruption). Of primary interest are the interactions occurring between systems and the emergent effects produced suggesting causality and aesthetic implications within a set of highly synthetic relations comprising machine, materials and narrative.